
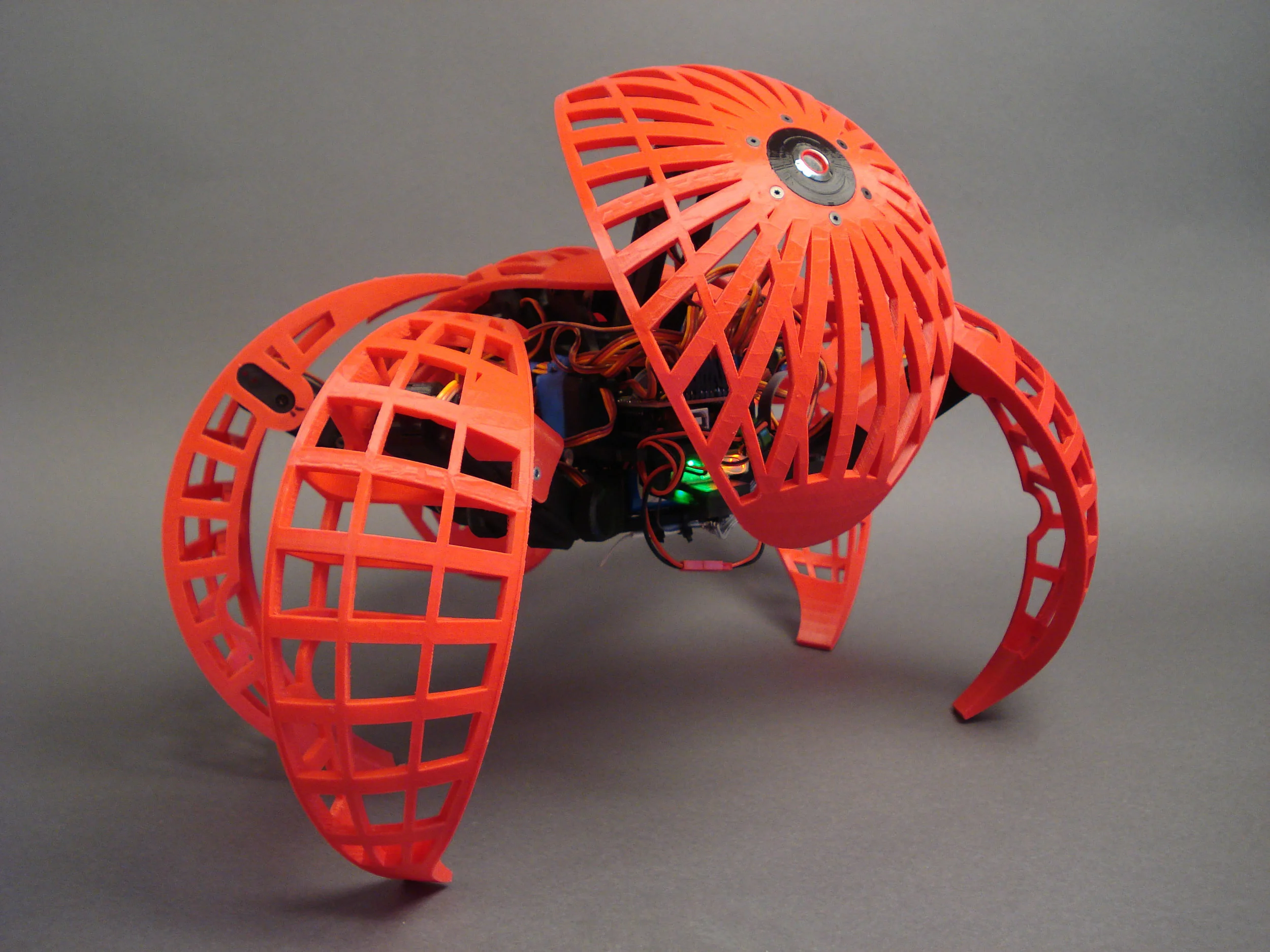


DangerBall it a quadruped robot that rolls up into a sphere the size of a basketball.
I wanted to build a complex robot using only inexpensive servos from Hobbyking. That was definitely the hard way to go. DangerBall’s servos can’t report their positions to the microcontroller, so all movements rely on a system of dead reckoning and pre-programed calibration points.
If I did this project again, I’d bite the bullet and buy nice Dynamixel robotics servos and a more powerful microprocessor. Trigonometry is possible on an Arduino, but not ideal.
Summer 2013
- Robotics Servos
- Walk Cycle programming and development
- Power Management
- Large Scale Printing
Not Available for Download